
1、步态进化机器人
5 H, O" [& X( ^6 y" g
2、大狗机器人
TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。' }: X4 b8 W9 D1 P
3、“突击队员”机器人
公仔箱論壇# Y7 U8 I( w. ^0 W) G8 C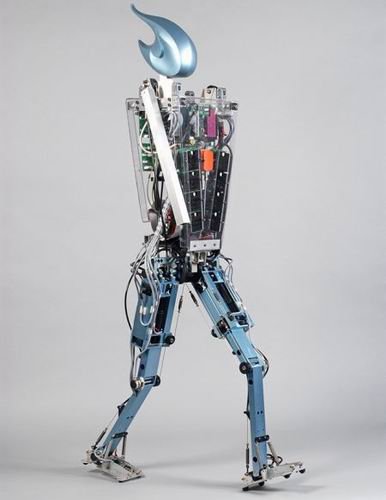
4、火焰机器人
tvb now,tvbnow,bttvb+ I+ Y# O9 p3 K; P1 m1 s; w TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。5 O- c; n! b, h: l$ A
TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。5 O- c; n! b, h: l$ A5、六足机器人
5、六足机器人TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。5 W5 B7 l. D7 }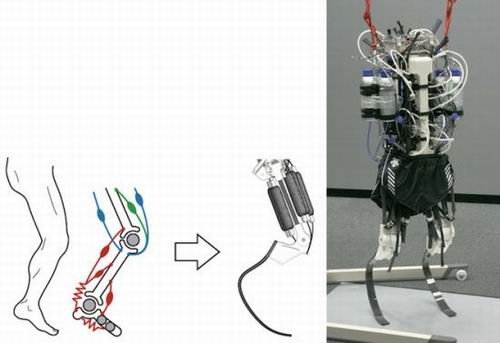 TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。$ F, v$ w! }( b
TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。$ F, v$ w! }( b6、“运动员机器人”
 7 N4 g% `. _* l/ |
7 N4 g% `. _* l/ |7、DNA机器人
7、DNA机器人7 z5 e. M9 B! W
8、Chumby机器人
8、Chumby机器人 tvb now,tvbnow,bttvb5 i- n0 ]) K4 J8 i, g
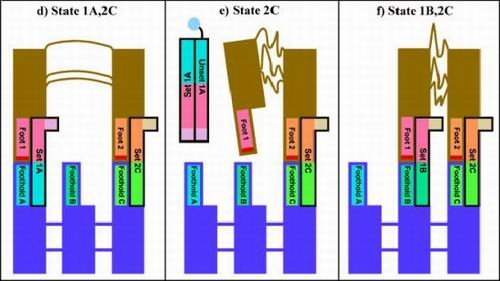
tvb now,tvbnow,bttvb5 i- n0 ]) K4 J8 i, g9、可下蹲的两足机器人
9、可下蹲的两足机器人公仔箱論壇( Q: [! b8 N/ f! } TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。+ T' F# f! J% ~- z- e( t' V3 u" \
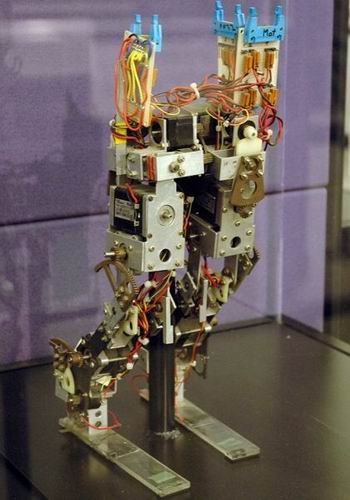
TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。+ T' F# f! J% ~- z- e( t' V3 u" \10、150美元DIY步行机器人
10、150美元DIY步行机器人TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。; d! ?4 ?* W$ M0 v5 Y
11、简易步行机器人通过套装组件即可实现
12、具有膝盖关节的机器人腿
12、具有膝盖关节的机器人腿4 p" q' ^, m% f( b& x5 Y
13、阿西莫机器人
13、阿西莫机器人| 歡迎光臨 公仔箱論壇 (http://www3.tvboxnow.com/) | Powered by Discuz! 7.0.0 |